

Yantar : le retour d'expérience des abysses

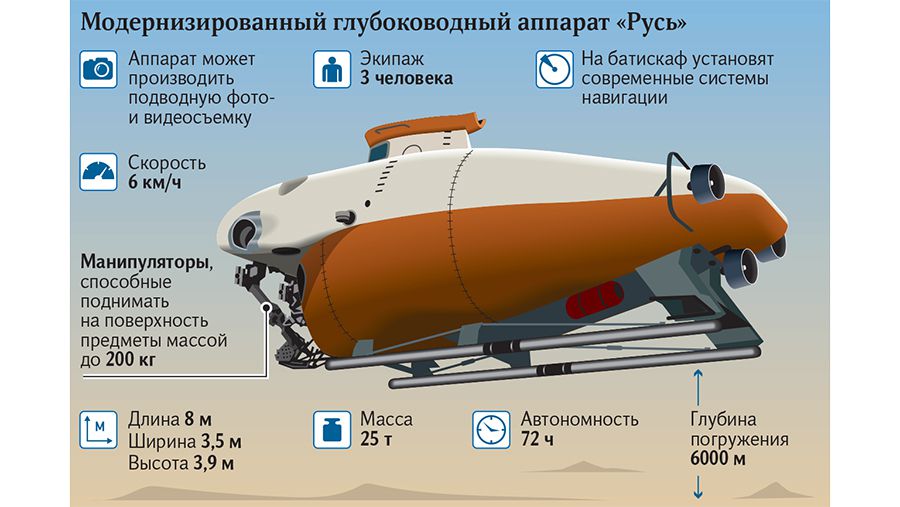
Le mini-submersible Rus. Source : MinDef russe
Le navire océanographique russe Yantar est rentré à sa base de Severomorsk (flotte du Nord) le 9 juin dernier, après avoir passé 11 mois en mer et parcouru près de 50 000 milles marins. Ce bâtiment et son équipage rapportent avec eux une précieuse expérience notamment acquise lors de leur participation aux recherches entreprises pour retrouver l'épave du sous-marin argentin San Juan.
Au cours de son périple, le Yantar (Projet 22010) aura relâché dans les ports d'une dizaine de pays : Chypre, l'île Maurice, les Seychelles, l’Afrique du Sud, l'Uruguay, l'Argentine, le Portugal, le Cap-Vert... Dérouté vers l'Argentine alors qu'il se trouvait au large de l'Angola, le Yantar a pris part à l'opération de sauvetage du sous-marin argentin naufragé San Juan en menant des recherches entre le 6 décembre 2017 et le 1er avril 2018. En 4 mois, le Yantar et son équipage auront ausculté une surface de près de 6 000 km² dans des conditions météorologiques qualifiées de délicates, voire difficiles. En vain : en dépit de la mobilisation de plusieurs marines, l'épave du submersible argentin n'aura pas été localisée. Le relief du fond de l'océan dans la zone des recherches parcourue par le Yantar se caractérise par des profondeurs allant de quelques centaines de mètres à plus de 5 000 mètres. Rattaché à la Direction principale des plongées et études en eaux profondes du ministère russe de la Défense (Главное управление глубоководных исследований Министерства обороны Российской Федерации) - ou GUGI -, le Yantar peut mettre en œuvre deux mini-submersibles bi-places ou tri-places : le AS-37 Rus (Projet 16810) et le AS-39 Konsul (Projet 16811). Suite à la mission de sauvetage au large de l'Argentine, le ministère russe de la Défense a d'ores et déjà décidé de procéder à la modernisation de l'AS-37 Rus.
Le mini-submersible AS-37 Rus (Projet 16810). Source : Izvestia.
Outre les travaux d'entretien et de réparations qui font suite à cette longue mission, l'AS-37 bénéficiera d'un nouveau système automatisé de navigation et de commande. Il est aussi question d'installer des batteries lithium-ion, afin d'augmenter son autonomie, et de changer les blocs qui assurent la flottabilité du bâtiment. La modernisation du Rus coïncide non seulement avec le "retex" de la mission "San Juan", mais aussi avec la nécessaire mise à niveau d'un mini-submersible conçu dans les années 1990 et admis au service actif au tout début des années 2000. L'objectif serait d'accroître les capacités de plongée du mini-submersible dans un environnement arctique. Au demeurant, il ne faut pas exclure que l'AS-37 ait montré ses limites dans l'Atlantique Sud, et que la marine souhaite combler dans la mesure du possible les lacunes identifiées en conditions opérationnelles. L'augmentation de l'activité sous-marine russe constatée ces dernière années concerne, semble t'il, principalement l'Atlantique Nord, l'Arctique et la Méditerranée. Aussi, l'expérience acquise lors de la recherche du San Juan doit pouvoir, le cas échéant, être mobilisée pour la recherche d'un sous-marin russe en détresse dans ces zones. A ce titre, la participation du Yantar à la mission de sauvetage du submersible argentin a fourni à l'évidence à son équipage une possibilité unique d'acquérir de l'expérience en matière de recherche et de sauvetage.
Une fois modernisée, l'AS-37 sera censé pouvoir atteindre la profondeur de 6000 mètres en 1h (contre 2h30 aujourd'hui) et disposer d'une autonomie pratique augmentée (10h actuellement). Le 15 décembre 2015, l'AS-37 Rus a réalisé une plongée par 6 810 mètres de fonds dans l'Atlantique, avec trois personnes à son bord. Ce n'est donc pas tant la capacité du Rus a évoluer par grande profondeur qui semble poser problème, mais plutôt l'autonomie et l'électronique embarquée, qui permettent d'optimiser chaque plongée, et d'augmenter ainsi les chances de succès. Se pose aussi la question de la cartographie des fonds marins, mais cet aspect a été identifié par la marine russe qui s'emploie à combler ses lacunes ou mettre à jour sa connaissance des fonds depuis quelques années.
Le Rus se trouve déjà au chantier naval de l'Amirauté (Saint-Pétersbourg) où il subit les premiers travaux. Son retour au service actif est prévu pour 2019.
Sources : Izvestia, Soumarsov...



/image%2F1075060%2F20210331%2Fob_5aa0e4_1617123627-umka-7.jpg)
/image%2F1075060%2F20201023%2Fob_9b1864_viktor-iii.jpg)
/image%2F1075060%2F20200424%2Fob_5d8606_fizik-2.png)
/image%2F1075060%2F20200323%2Fob_83a9c0_projet-955.jpg)
Abonnez-vous pour être averti des nouveaux articles publiés.
- A propos
- Autres bâtiments de surface
- Brises-glace
- Corvettes
- Export
- Flotte de la Baltique
- Flotte de la mer Noire
- Flotte du Nord
- Flotte du Pacifique
- Frégates
- Grands bâtiments amphibies
- Petits navires lance-missiles
- Programmes de modernisation
- Sites connexes
- Sites partenaires
- Site Web de l'auteur
- Sous-marins classiques
- Sous-marins nucléaires
- 108 Sous-marins
- 70 Chantiers navals
- 67 Flotte de la Mer Noire
- 52 Actualité
- 45 BPC pour la Russie
- 38 Surface
- 37 Manoeuvres et exercices
- 31 Flotte du Nord
- 30 Flotte du Pacifique
- 28 Russie-Inde
- 21 Aéronavale
- 21 Méditerranée
- 17 Porte-avions
- 16 Flottille de la Caspienne
- 16 Russie-Ukraine
- 15 Russie-Syrie
- 13 Projet 11356
- 13 Projet 22350
- 12 Escadre méditerranéenne
- 11 Projet 0636.3
- 10 Flotte de la Baltique
- 9 Bases navales
- 9 Mer et espace
- 8 Projet 955
- 6 Projet 1164
- 6 Projet 21631
- 6 Projet 22160
- 6 Projet 885
- 6 Russie-Turquie
- 6 Salons
- 5 Projet 11711
- 5 Projet 20380
- 5 Projet 22800
- 5 Russie-Chine
- 4 Arctique
- 4 Projet 1143.5
- 4 Projet 1144
- 4 Projet 1155
- 4 Projet 23560
- 4 Russie-Algérie
- 3 Projet 20385
- 3 Projet 22870
- 3 Russie-Egypte
- 3 Russie-Iran
- 2 Projet 12700
- 2 Projet 18280
- 2 Projet 22010
- 2 Projet 23000
- 2 Projet 636
